Abstract
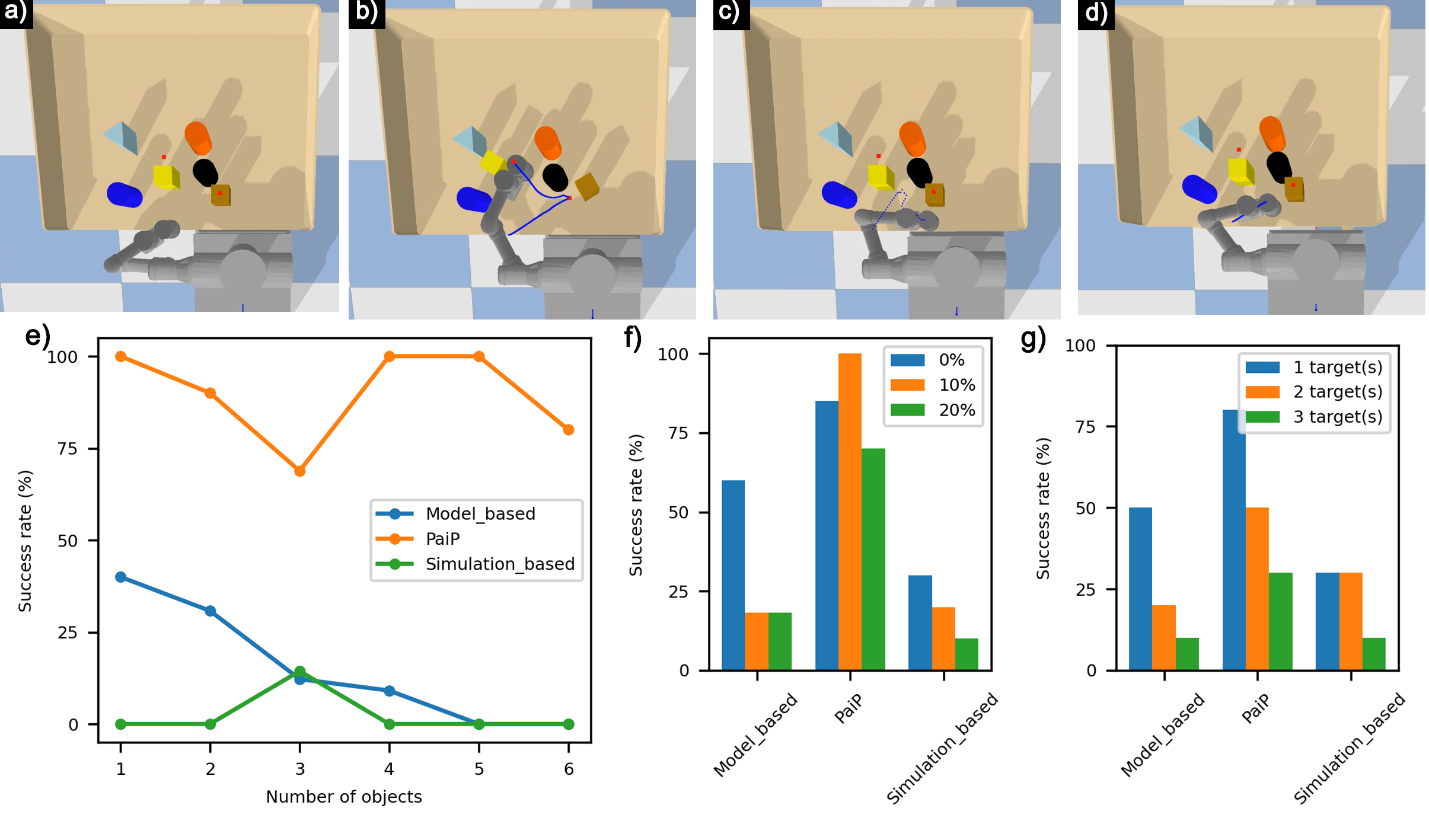
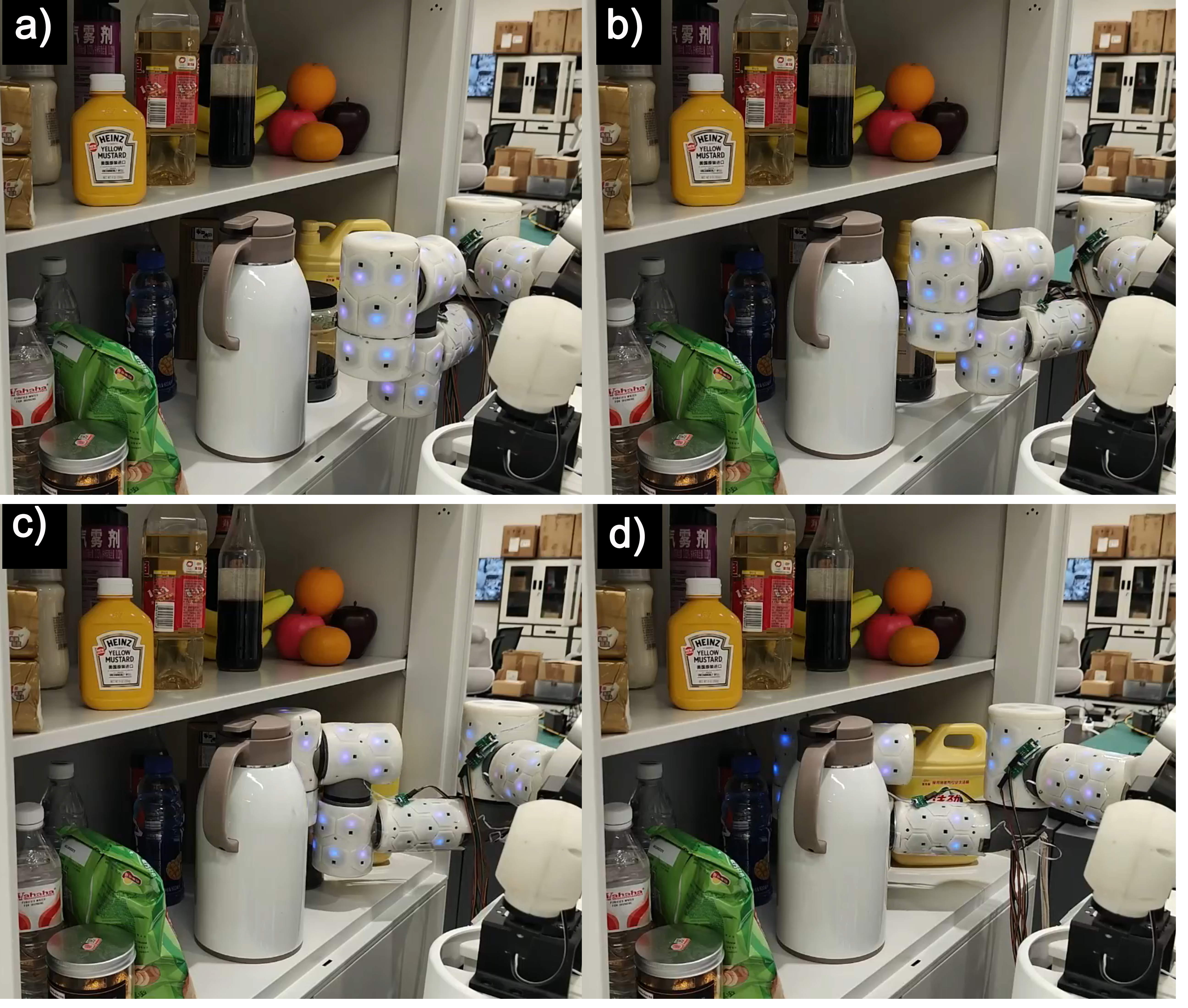
Box/cabinet scenarios pose significant challenges for robotic motion due to visual occlusions and constrained free space caused by stacked objects.
Traditional collision-free trajectory planning methods often fail when no collision-free paths, and may even lead to catastrophic collisions caused by invisible objects.
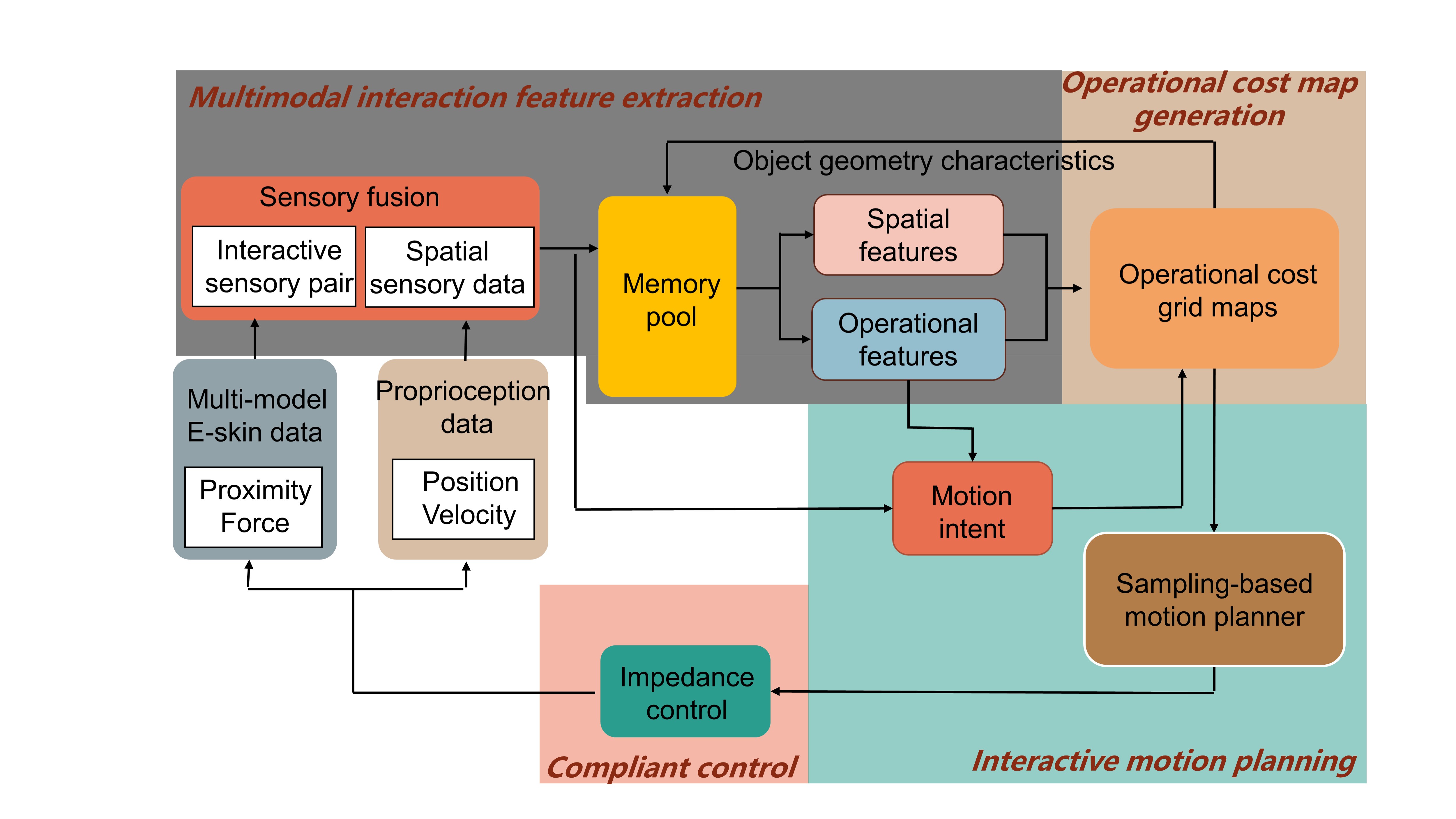
To overcome these challenges, we propose an operational aware interactive motion planner (PaiP) a real-time closed-loop planning framework utilizing multimodal tactile perception.
This framework autonomously infers object interaction features by perceiving motion effects at interaction interfaces.
These interaction features are incorporated into grid maps to generate operational cost maps. Building upon this representation,
we extend sampling-based planning methods to interactive manipulation by optimizing both path cost and operational cost.
Experimental results demonstrate that PaiP achieves robust motion in narrow spaces.